Контакты:
+7 (4872) 52-10-04
г. Тула, ул. Степанова, д. 34А
Пишите нам на info@brevis-interactive.ru
![]()
![]()


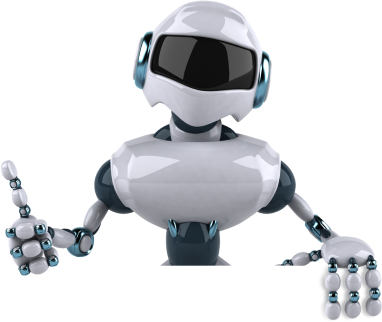
Продвинутый набор для разработки автономных мобильных роботов предназначенный для обучения ROS. Он оснащен NVIDIA Jetson Nano, высокопроизводительным моторами, лидаром, 3D-камерой глубины и 7-дюймовым экраном. Картографирование и навигация, планирование пути, отслеживание и предотвращение препятствий, автономное вождение, распознавание человеческих черт, соматосенсорное взаимодействие и голосовое взаимодействие. JetAuto использует лидар для обнаружения окружения в режиме реального времени, обеспечивая как одноточечную, так и многоточечную навигацию. Он может перепланировать маршрут, чтобы избежать препятствия и продолжить движение. JetAuto может обеспечить навигацию для нескольких транспортных средств, планирование пути и интеллектуальное предотвращение препятствий.
Исследовательский уровень: Знакомство со сложной кинематикой, основы тригонометрии, углубленное изучение текстовых языков программирования, изучение физических основ работы датчиков.
Продвинутый уровень: Изучить алгоритмы поиска пути: A*, Dijkstra, RRT, PRM, Развитие навыков планирования движения: локальное и глобальное планирование, планирование траекторий. Распознавания графических маркеров, распознавание массивов линий и элементов дорожных знаков и разметки, картография, распознавание направления источника звука. Способы использования роботов и глубокого обучения для автоматизации различных процессов. Визуализация облака точек.


Компания «Бревис» выступила активным социальным партнером в проведении Единого дня открытых дверей федерального проекта «Профессионалитет» в Тульском государственном технологическом колледже и Донском политехническом колледже.

На прошлой неделе в МБОУ «СОШ № 3» (мкр. Сокольники, г. Новомосковск) прошла удивительная форсайт-сессия «Школа настоящего»! Это было не просто мероприятие, а настоящий мозговой штурм, где встретились педагоги, ученики и представители бизнеса, чтобы вместе подумать о том, какой должна быть школа будущего. Компания «Бревис» стала частью этого важного события, и мы хотим поделиться впечатлениями!

20 февраля на базе Донского политехнического колледжа завершился региональный этап Чемпионата профессионального мастерства «Профессионалы - 2025»!

18 февраля в рамках деловой программы регионального этапа Всероссийского чемпионата «Профессионалы» состоялась научно-практическая конференция «Профессионалитет: формируем кадровое лидерство страны»

13 декабря 2024 года в сельском посёлке Бегичевский произошло знаменательное событие — торжественное открытие обновлённого Центра образования № 14 после капитального ремонта, проведённого в рамках национального проекта «Образование». Компания «Бревис» была приглашена в качестве почётных гостей и активных участников процесса обновления школы.

Компания «Бревис» была приглашена на празднование 75-летия со дня основания Донского политехнического колледжа, которое состоялось 13 декабря 2024 года.

29 ноября 2024 года на базе ГПОУ ТО «Тульский государственный технологический колледж» прошел региональный IT-форум «ТехноЛОГИЧНЫЙ «Я», приуроченный ко Дню защиты информации. Компания "Бревис" в лице Капулера Ильи и Никулина Андрея приняла активное участие в этом значимом событии!

Успех на пути профессионального роста!
Преподаватели образовательных учреждений, входящих в состав кластера «Средства массовой информации и коммуникационных технологий», успешно прошли регулярную стажировку в компании «Бревис».

21 ноября в ЦОПП Тульской области прошел региональный фестиваль технического творчества и современных технологий TexHoFest.
Более 80 участников из 62 образовательных учреждений Тульской области собрались, чтобы поделиться своими достижениями и узнать о последних тенденциях в мире IT.

Генеральный директор компании «Бревис» Антон Суслин принял активное участие в главном хакатоне Тульской области TulaHackDays 2024, который прошел с 15 по 17 ноября в ТГПУ им. Л. Н. Толстого. В качестве ментора он поддерживал несколько команд, делясь своим опытом в разработке и управлении проектами.

Второй этап регионального конкурса «Мастер IT», посвящённый Дню народного единства, успешно завершён! Участники продемонстрировали не только высокий уровень технических навыков, но и способность ярко и убедительно презентовать свои проекты, показав глубокое понимание исторической значимости праздника.

Компания «Бревис» выступила партнером II Межрегионального педагогического хакатона «Цифровые инструменты в образовательной деятельности», который состоялся на базе ТГПУ им. Л.Н. Толстого.

Компания «Бревис» провела мастер-класс на Дне открытых дверей «Профессионалитета» в Тульском государственном технологическом колледже

Компания «Бревис» провела обучение по нейросетям для педагогов МБОУ «СОШ № 3»
Уважаемые коллеги!
Компания «Бревис» поздравляет вас с Днем учителя! Этот день – это не только профессиональный праздник, но и повод выразить огромную благородность за ваш труд и заботу о детях.
Уважаемые коллеги!
Компания «Бревис» от всей души поздравляет вас с Днем среднего профессионального образования!

24 сентября 2024 года генеральный директор ООО «Компания Бревис» Суслин Антон Александрович принял участие в семинаре на тему «Формирование профилей компетенций выпускников по отраслям ФП «Профессионалитет».

3 сентября компания «Бревис» приняла участие в торжественном открытие Центра цифрового образования детей «IT-куб», расположенного в Богородицком политехническом колледже.

2 сентября 2024 года на базе Донского политехнического колледжа состоялось открытие Центра опережающей профессиональной подготовки в области информационно-коммуникационных технологий (ЦОПП ИКТ).

Дорогие ученики, студенты, учителя и родители!
Компания «Бревис» поздравляет вас с Днем Знаний! Этот день — символ нового начала, новых возможностей и стремления к знаниям...
Мы перезвоним вам и проконсультируем по всем интересующим вопросам!
Мы перезвоним вам и проконсультируем по всем интересующим вопросам!
Мы перезвоним вам и проконсультируем по всем интересующим вопросам!